我院飞行器控制系王佳楠副教授近期在国际顶级控制期刊IEEE Transactions on Automatic Control以及Automatica 上分别发表题为”Robust output feedback consensus for networked Negative-Imaginary systems”及”Robust cooperative control of multiple heterogeneous negative-imaginary systems”的学术论文。
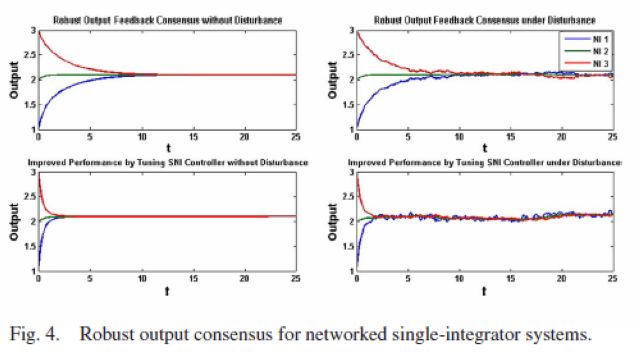
负虚系统(Negative-Imaginary systems)是由国际知名控制专家Alexander Lanzon教授及其合作者澳大利亚双院院士Ian R. Petersen教授于2008年提出,其主要应用在处理挠性结构的鲁棒控制。王佳楠副教授结合图论技术提出了负虚系统网络全新的建模方法,并将鲁棒控制与协同控制巧妙结合,解决了同构负虚系统网络的鲁棒输出一致性问题。该成果发表于今年IEEE Transactions on Automatic Control第60卷9期:p2547-2552。
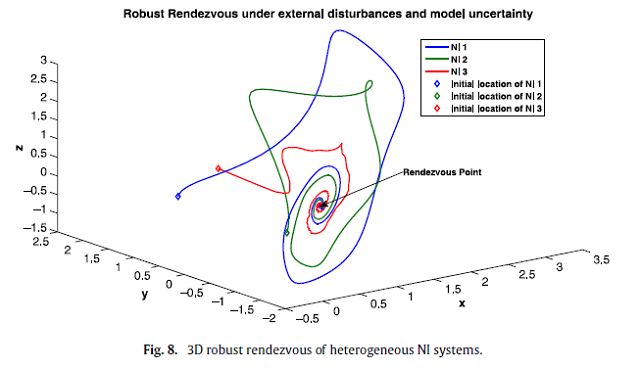
随后,进一步针对异构负虚系统网络鲁棒协同控制问题,提出全新的网络建模方法以及系统输出一致性的判定准则。该成果发表在今年Automatica第61卷,p64-72上。
王佳楠,男,副教授,1982年5月出生。2004年毕业于北京交通大学电气工程学院获学士学位,2007年毕业于北京理工大学ld体育官网获硕士学位,2011年毕业于美国密西西比州立大学获博士学位。2012年1月至2013年5月,美国中佛罗里达大学任职博士后,从事协同控制理论在智能电网中应用研究。2013年6月至2014年11月,英国曼彻斯特大学任职副研究员,从事多无人机系统协同控制研究。2014年12月至今,北京理工大学ld体育官网飞行器控制系任职副教授,从事多无人机系统算法与应用研究。其研究方向包括多智能体系统协同控制,鲁棒控制,最优控制,多传感器网络协同滤波算法,壁障/撞算法及网络系统安全等。王佳楠副教授荣获2015年北京理工大学优秀青年教师称号并获得教育部重点实验室研究课题资助。现任美国航空航天协会高级会员,美国电子工程师协会会员,美国控制系统协会会员,美国电子工程师协会青年专家。
(审核:胡更开)

